















Roundss News

- Changchun Rongde Optics
- Co.,Ltd.
- AddŁşNo.1666 Yaan Road,
- North Lake Development District,
- Changchun 130102,China
- TelŁş86-431-81881745
- FaxŁş86-0431-85256892
- E-mailŁşrongdecui@roundss.net
- SkypeŁşadacui_roundss
Company News
Current position ŁşHome > News > Photoelectric Sense
Photoelectric encoder working principlesŁˇ
Changchun Rongde Optics Co.,Ltd. Release timeŁş2016/6/17 BrowseŁş1764Photoelectric encoder working principles
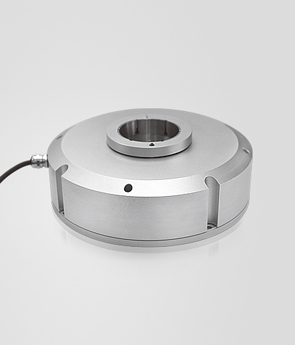
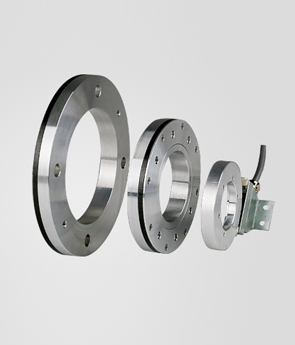
Photoelectric encoder, a photoelectric conversion by a mechanical displacement of the output shaft of the geometry into a pulse or digital sensors. Photoelectric encoder output 600 pulses per revolution, five-wire system. Wherein the two power supply lines, three lines of pulse (A-phase, B-phase, Z). The operating voltage of the power supply (+ 5 ~ + 24V) DC power supply. Photoelectric encoder grating disk and by the photodetector device component. Grating disk is partially a certain diameter circular plate, etc. opening of a number of rectangular holes. Since the photoelectric encoder coaxial with the motor, the motor is rotated, with the grating disk and the motor rotation speed, number of pulse signals output by the detection means detecting light-emitting diodes and other electronic components, the schematic diagram shown in Figure 1; calculated per second the number of photoelectric encoder output pulse can reflect the current motor speed. In addition, for the determination of a rotational direction, encoder also provides a phase difference of 90? The two pulse signals.
How it works: When the optical encoder shaft A, B generates a pulse output two lines, A, B two-phase pulse phase angle of 90 degrees, which can measure the optical encoder rotation direction of the motor speed. If the A-phase pulse B pulse phase advance than the photoelectric encoder is forward, otherwise reverse. Z zero pulse wire line, optical encoder generates one pulse per revolution. Mainly used for counting. A line is used to measure the number of pulses, B line and the A line with the direction of rotation can be measured.
N is the rotational speed of the motor
¦¤n = ND measure -ND management
For example: We vehicle speed of 1.5m / s, the wheel diameter 220mm, C = D * Pi, the motor control 21.7 rev / sec, the servo system according to the indicator, set the motor speed of 1500 rev / min, so can be evaluated properly ND = 21.7 * 60 = 130 rev / min, the number of pulses per second optical encoder output is:
PD = 130 ˇÁ 600/60 = 1300 pulses
When the number of pulses measured and calculated standard deviation value may be calculated according to the corresponding relationship between voltage and the number of pulses of the output voltage to the servo system increment ˇ÷ U, through the D / A converter, then calculate the increase volume pulse number, wait for the next subtract.
When you run the longer the longer route, departing from us prefabricated on more routes. Then the system start position loop, by continuously measuring the number of pulses per second photoelectric encoder output, and standard value PD (ideal value) are compared to calculate the incremental ˇ÷ P and convert them into the corresponding D / A digital output, reducing output by a motor controller of the number of pulses, based on the original output voltage minus the increment, forcing the motor speed down, when measured ˇ÷ P is approximately zero stop adjustment, which can be motor speed is always controlled within the agreed range.
Photoelectric encoder, a photoelectric conversion by a mechanical displacement of the output shaft of the geometry into a pulse or digital sensors. Photoelectric encoder output 600 pulses per revolution, five-wire system. Wherein the two power supply lines, three lines of pulse (A-phase, B-phase, Z). The operating voltage of the power supply (+ 5 ~ + 24V) DC power supply. Photoelectric encoder grating disk and by the photodetector device component. Grating disk is partially a certain diameter circular plate, etc. opening of a number of rectangular holes. Since the photoelectric encoder coaxial with the motor, the motor is rotated, with the grating disk and the motor rotation speed, number of pulse signals output by the detection means detecting light-emitting diodes and other electronic components, the schematic diagram shown in Figure 1; calculated per second the number of photoelectric encoder output pulse can reflect the current motor speed. In addition, for the determination of a rotational direction, encoder also provides a phase difference of 90? The two pulse signals.
How it works: When the optical encoder shaft A, B generates a pulse output two lines, A, B two-phase pulse phase angle of 90 degrees, which can measure the optical encoder rotation direction of the motor speed. If the A-phase pulse B pulse phase advance than the photoelectric encoder is forward, otherwise reverse. Z zero pulse wire line, optical encoder generates one pulse per revolution. Mainly used for counting. A line is used to measure the number of pulses, B line and the A line with the direction of rotation can be measured.
N is the rotational speed of the motor
¦¤n = ND measure -ND management
For example: We vehicle speed of 1.5m / s, the wheel diameter 220mm, C = D * Pi, the motor control 21.7 rev / sec, the servo system according to the indicator, set the motor speed of 1500 rev / min, so can be evaluated properly ND = 21.7 * 60 = 130 rev / min, the number of pulses per second optical encoder output is:
PD = 130 ˇÁ 600/60 = 1300 pulses
When the number of pulses measured and calculated standard deviation value may be calculated according to the corresponding relationship between voltage and the number of pulses of the output voltage to the servo system increment ˇ÷ U, through the D / A converter, then calculate the increase volume pulse number, wait for the next subtract.
When you run the longer the longer route, departing from us prefabricated on more routes. Then the system start position loop, by continuously measuring the number of pulses per second photoelectric encoder output, and standard value PD (ideal value) are compared to calculate the incremental ˇ÷ P and convert them into the corresponding D / A digital output, reducing output by a motor controller of the number of pulses, based on the original output voltage minus the increment, forcing the motor speed down, when measured ˇ÷ P is approximately zero stop adjustment, which can be motor speed is always controlled within the agreed range.
 PreviousŁşDVC 48 Servo motor optical encoder NextŁşThe encoder working principle, Function and Classification
PreviousŁşDVC 48 Servo motor optical encoder NextŁşThe encoder working principle, Function and Classification
 Products
Products