
















- Changchun Rongde Optics
- Co.,Ltd.
- Add��No.1666 Yaan Road,
- North Lake Development District,
- Changchun 130102,China
- Tel��86-431-81881745
- Fax��86-0431-85256892
- E-mail��rongdecui@roundss.net
- Skype��adacui_roundss
Company News
Current position ��Home > News > Photoelectric Sense
The concept of photoelectric encoder and the working principle of photoelectric encoder ��
Changchun Rongde Optics Co.,Ltd. Release time��2016/6/23 Browse��865The concept of photoelectric encoder and the working principle of photoelectric encoder
The article tells the concept of photoelectric encoder and the working principle of photoelectric encoder.
Working principle: when the photoelectric encoder shaft rotates A, B two wires produce pulse output, A, B two phase pulse phase Angle difference 90 degrees, which can measure the rotation direction of photoelectric encoder and the motor speed. If A pulse than B phase pulse advance, the forward of the photoelectric encoder, or for the inversion. Z line is zero pulse line, every turn A circle to create A photoelectric encoder pulse. Mainly used for counting. A line used to measure the pulse number, B line with A line to measure the rotation direction.
N for the motor speed
- ND �� n = ND test
For example, the speed of our car is 1.5 m/s, wheel diameter is 220 mm, C = D * Pi, motor control around 21.7 per second, according to the index of servo system, motor speed is 1500 RPM, can be obtained when a ND = 21.7 * 60 = 130 RPM, optical encoder the number of pulses per second output is:
PD = 600/60 = 130 x 1300 pulse
When measured pulse number and calculate the standard deviation, according to the corresponding relationship of voltage and pulse number to calculate the output to the servo system of incremental delta voltage U, through D/A conversion, and then calculate the incremental pulse number, minus.
When running, the longer the longer route prefabricated route deviation is from us. The system starting position loop, through continuous measurement of photoelectric encoder number of pulses per second output and comparing with standard PD (ideal), and calculate the incremental delta P and converted to the corresponding digital output D/A, decrease the number of lost A motor pulse by the controller on the basis of the original output voltage minus delta, forcing motor droop down, when the delta P approximate to zero stop adjustment measure, which can control motor speed has always been in the permitted range.
According to the principle of detection, can be divided into optical encoder type, magnetic type, inductive and capacitive. According to the calibration method and the mode of its output signal, can be divided into incremental and absolute type and hybrid 3 kinds.
1.1 the incremental encoder
Incremental encoder is directly using the principle of photoelectric conversion output three square wave pulse phase A, B and Z; A, B two groups of pulse phase difference 90 workers the evil spirit award ash Gu discharge milling is put more novelty �Z phase for each turn A pulse, for reference point positioning. It has the advantage of simple principle structure, mechanical life expectancy can be in the tens of thousands of hours, strong anti-jamming capability, high reliability, suitable for long distance transport. The downside is unable to output shaft rotation absolute position information.
1.2 absolute encoder
Absolute encoder is direct digital output of the sensor, on its round encoder, several concentric yards along the radial direction, each consisting of pervious to light and opaque and sector, relationship between adjacent code number of sectors is double, the code number on the encoder is the binary digital digits, in the side of the encoder is a light source, the other side corresponding to every yard a photosensitive element; When the encoder is in different position, the photosensitive element according to the light or not proper level signal conversion, form a binary number. The characteristics of the encoder is not counter, in any position of the rotor can be read out a fixed position and corresponding digital code. Obviously, the more code word, the higher the resolution, has N bit binary for a resolution of the encoder, the encoder must have N barcode. The current domestic existing 16-bit absolute encoder products.
Absolute encoder are using natural binary or circulation binary (gray code) way of photoelectric conversion. Absolute encoder and incremental encoder differed from the disk in pervious to light, opaque line graphics, absolute encoder can have several coding, according to read the code on the encoder, absolute position detection. The design of the code can use binary code, cyclic code, two's complement, etc. Its features are:
1.2.1 can directly read out the absolute value of the Angle coordinate;
1.2.2 no cumulative error;
1.2.3 power source location information will not be lost after resection. But the resolution is determined by the binary digits, i.e. accuracy depends on the figures, there are 10 and 14, etc.
1.3 hybrid absolute value encoder
Hybrid absolute encoder, it outputs two sets of information: a set of information to detect magnetic pole position, with absolute information function; Another group with completely incremental encoder output information.
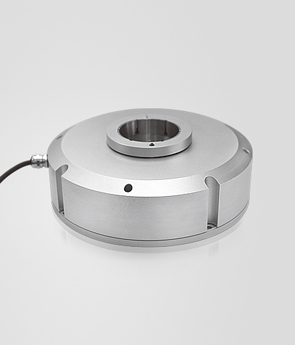
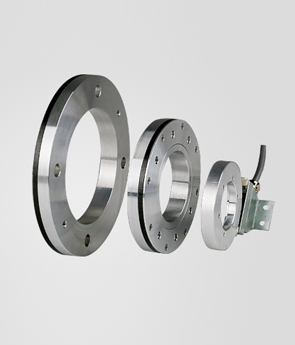
Photoelectric encoder is a kind of Angle detection device (angular velocity), it will be input to the shaft Angle, using the principle of photoelectric conversion into corresponding electrical pulses or digital quantity, has small volume, high accuracy, reliable operation, the advantages of digital interface. It is widely used in CNC machine tools, rotary table, servo drive and determination of robot, radar, military, etc need to detect Angle of plant and equipment.
 Previous��Rotating transformer, incremental encoder, absolute encoder Next��About the resolution and accuracy of rotary encoder
Previous��Rotating transformer, incremental encoder, absolute encoder Next��About the resolution and accuracy of rotary encoder
 Products
Products