
















- Changchun Rongde Optics
- Co.,Ltd.
- Add:No.1666 Yaan Road,
- North Lake Development District,
- Changchun 130102,China
- Tel:86-431-81881745
- Fax:86-0431-85256892
- E-mail:rongdecui@roundss.net
- Skype:adacui_roundss
Company News
Current position :Home > News > Photoelectric Sense
The introduction and classification of Rotary encoder!
Changchun Rongde Optics Co.,Ltd. Release time:2016/7/6 Browse:728The introduction and classification of Rotary encoder
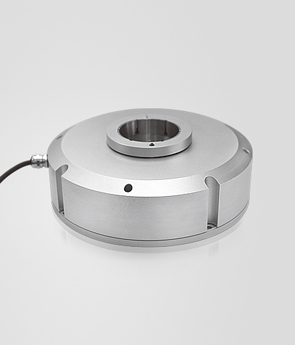
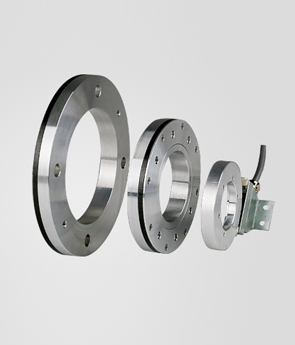
Rotary encoder is used to measure the rotational speed and cooperate with the PWM technology can realize fast speed regulating device, photoelectric rotary encoder through the photoelectric conversion, output shaft angular displacement, angular velocity can be transformed into corresponding mechanical quantities such as electrical impulses to digital output (REP). It is divided into single output and dual output two kinds. Technical parameters are mainly each pulse number (dozens to several thousand), and the power supply voltage, etc. Single-channel output refers to the output of the rotary encoder is A set of pulses, and dual output rotary encoder output two group A/B phase difference of 90 degrees pulse, speed can be measured by the two groups of pulse not only, still can determine the direction of rotation.Basic introduction to
The encoder as to points can be divided into the principle of signal
The incremental pulse encoder: SPC
Absolute pulse encoder: APC
Both are generally applied to the speed control and position control system of detecting element.
The distinction between the incremental encoder and absolute encoder
According to the working principle of the encoder can be divided into two categories, incremental and absolute type.
Incremental encoder is converting displacement into periodic signal, and then convert the electrical signals into count pulse, with the size of the displacement of the number of pulse said. Absolute encoder type of each location corresponding to a certain numerical code, so it's only with the measurement value for start and stop position, and has nothing to do with the measurement in the middle of the process.
Rotating to turn the output pulse incremental encoder, through counting device to know its position, when the encoder or power failure, rely on counting device's internal memory to remember the location. So, after the power outage, there cannot be any movement, encoder when calls work, in the process of the encoder output pulse, also can't be a pulse interference and loss, otherwise, the counting device memory of zero offset, and the amount of the offset is don't know, can only know wrong after the production results.
Every solution is to increase the reference point, encoder through reference point, to amend the reference position into the counting device memory location. Before the reference point, can't be ensure the accuracy of the position. Therefore, in the industrial control is look for the reference point, each operation boot method such as the change.
Printers, scanners, for example, the positioning of the principle is to use incremental encoder, the computer, we can all hear chip, li crash of a ring, it is looking for a reference zero, then work.
Such an approach to some industrial projects more troublesome, even not allowed to change boot (after startup to know accurate location), and there was the emergence of the absolute encoder.
Absolute rotary optical encoder, because its every position only, anti-interference, absolutely no power lost memories, already more and more widely used in various industrial Angle, length measuring and positioning control of systems.
Absolute encoder optical encoder, there are many scribed line, every groove in turn in lines to 2, 4, 8, 16 line... Arrangement, so, in every position of encoder, by reading each groove and the dark, get a set of zero power from 2 to 2 n - 1 to the power of the only two hexadecimal code (gray code), it is called a n a absolute encoder. The encoder is determined by mechanical position encoder, it is not affected by power outages, interference.
 Previous:The value of the linear scale Next:The distinction between the incremental encoder and absolute encoder
Previous:The value of the linear scale Next:The distinction between the incremental encoder and absolute encoder
 Products
Products