
















Roundss News

- Changchun Rongde Optics
- Co.,Ltd.
- Add:No.1666 Yaan Road,
- North Lake Development District,
- Changchun 130102,China
- Tel:86-431-81881745
- Mobile:+86 15843030327
- E-mail:rongdecui@roundss.net
- Skype:adacui_roundss
Positioning master in the motor - Encoder!
Changchun Rongde Optics Co.,Ltd. Release time:2016/9/28 Browse:1025Positioning master in the motor - Encoder
In this case,
How often do lifts that people use in their lives send people precisely to designated floors? How is the machine tool precisely cut? Servo motor is how to ensure the accuracy of the rotation position? All this thanks to an artifact - encoder, but the encoder is what? He is how to accurately measure the motor position it? Today to talk about the encoder.
First, what is the encoder
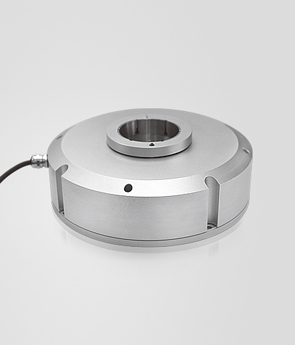
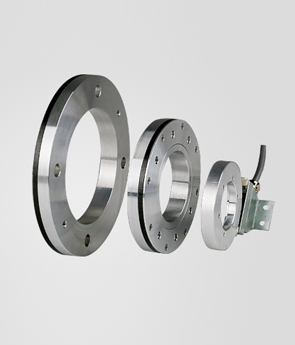
An encoder is a device that converts signals or data into signals that can be used to communicate, transmit, and store. Encoder to angular displacement or linear displacement into electrical signals, the former known as the code disk, which is called the code scale. He is commonly used in industrial motor positioning equipment, can accurately test the motor angular displacement and rotation position.
Second, the encoder classification
According to the working principle of the encoder can be divided into two types of incremental and absolute. Incremental encoder is the displacement into a periodic electrical signal, then the electrical signal into a count pulse, with the number of pulses that the size of the displacement. Each position of the absolute encoder corresponds to a definite digital code, so its indication is only related to the starting and ending positions of the measurement, independent of the intermediate process of the measurement.
1, incremental type
Incremental encoder usually has three output ports, respectively, A phase, B phase, Z phase output, A phase and B phase delay between each other 1/4 cycle pulse output, according to the delay relationship can distinguish between positive and negative, And by taking A phase, B-phase rise and fall can be 2 or 4 times; Z-phase single-turn pulse, that is issued per cycle of a pulse.
The grating of incremental measurement consists of a periodic grid. The position information is obtained by calculating the number of increments (number of measurement steps) from a certain point. Since the position value must be determined with an absolute reference point, the circular raster encoder also has a reference point track.
2, the absolute type
Absolute encoder is corresponding to a circle, the angle of each reference to issue a unique binary value corresponding to the angle, the external circle device can be recorded by a number of locations and measurements.
Encoder power can be immediately obtained when the position value and for subsequent signal processing electronic circuit to read. You do not have to move the axes to perform reference point homing. Absolute position information is derived from a circular raster encoder, which consists of a series of absolute codes. A separate incremental track signal generates a position value by subdividing it and also generating an optional incremental signal.
The absolute position value information of the single-turn encoder is repeated once per revolution. Multi-turn encoders can also distinguish the position value of each turn.
They have the biggest difference: in the case of incremental encoders, the position is determined by the number of pulses counted from the zero mark, and the position of the absolute encoder is determined by the reading of the output code. The reading of the output code at each position is unique across a circle so that the absolute encoder is not separated from the actual position when the power is turned off. If the power supply is switched on again, the position readings are still current and valid and, unlike incremental encoders, the zero mark must be sought.
In this case,
How often do lifts that people use in their lives send people precisely to designated floors? How is the machine tool precisely cut? Servo motor is how to ensure the accuracy of the rotation position? All this thanks to an artifact - encoder, but the encoder is what? He is how to accurately measure the motor position it? Today to talk about the encoder.
First, what is the encoder
An encoder is a device that converts signals or data into signals that can be used to communicate, transmit, and store. Encoder to angular displacement or linear displacement into electrical signals, the former known as the code disk, which is called the code scale. He is commonly used in industrial motor positioning equipment, can accurately test the motor angular displacement and rotation position.
Second, the encoder classification
According to the working principle of the encoder can be divided into two types of incremental and absolute. Incremental encoder is the displacement into a periodic electrical signal, then the electrical signal into a count pulse, with the number of pulses that the size of the displacement. Each position of the absolute encoder corresponds to a definite digital code, so its indication is only related to the starting and ending positions of the measurement, independent of the intermediate process of the measurement.
1, incremental type
Incremental encoder usually has three output ports, respectively, A phase, B phase, Z phase output, A phase and B phase delay between each other 1/4 cycle pulse output, according to the delay relationship can distinguish between positive and negative, And by taking A phase, B-phase rise and fall can be 2 or 4 times; Z-phase single-turn pulse, that is issued per cycle of a pulse.
The grating of incremental measurement consists of a periodic grid. The position information is obtained by calculating the number of increments (number of measurement steps) from a certain point. Since the position value must be determined with an absolute reference point, the circular raster encoder also has a reference point track.
2, the absolute type
Absolute encoder is corresponding to a circle, the angle of each reference to issue a unique binary value corresponding to the angle, the external circle device can be recorded by a number of locations and measurements.
Encoder power can be immediately obtained when the position value and for subsequent signal processing electronic circuit to read. You do not have to move the axes to perform reference point homing. Absolute position information is derived from a circular raster encoder, which consists of a series of absolute codes. A separate incremental track signal generates a position value by subdividing it and also generating an optional incremental signal.
The absolute position value information of the single-turn encoder is repeated once per revolution. Multi-turn encoders can also distinguish the position value of each turn.
They have the biggest difference: in the case of incremental encoders, the position is determined by the number of pulses counted from the zero mark, and the position of the absolute encoder is determined by the reading of the output code. The reading of the output code at each position is unique across a circle so that the absolute encoder is not separated from the actual position when the power is turned off. If the power supply is switched on again, the position readings are still current and valid and, unlike incremental encoders, the zero mark must be sought.
 Previous:How does the encoder work Next:The Connection Between Single Chip Microcomputer and Incremental Rotary Encoder
Previous:How does the encoder work Next:The Connection Between Single Chip Microcomputer and Incremental Rotary Encoder
 Products
Products