

















- Changchun Rongde Optics
- Co.,Ltd.
- Add:No.1666 Yaan Road,
- North Lake Development District,
- Changchun 130102,China
- Tel:86-431-81881745
- Mobile:+86 15843030327
- E-mail:rongdecui@roundss.net
- Skype:adacui_roundss
Company News
Current position :Home > News > Photoelectric Sense
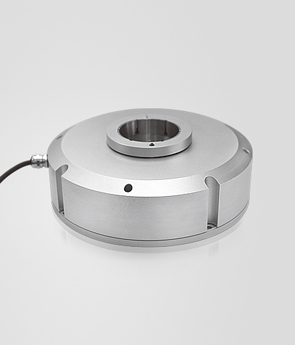
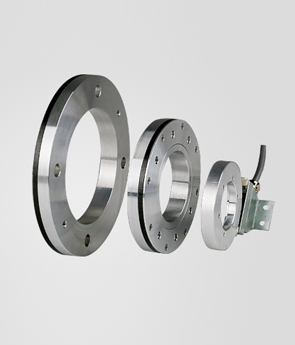
The working principle of magnetic rotary encoder!
Changchun Rongde Optics Co.,Ltd. Release time:2017/1/5 Browse:1225Magnetic rotary encoder is mainly composed of magnetoresistive sensor, magnetic drum, signal processing circuit and mechanical structure components. The working principle of the magnetic encoder is to detect the change of the weak magnetic field signal by the principle of magnetoresistance change.
Drum drum into a small magnetic poles at equal intervals, magnetic poles are magnetized, the drum in the rotation can be distributed in the surrounding space cyclically changing magnetic field. In a certain pitch, the magnetic field of the Y direction component in each pole is just above the location, its value is zero; in the middle of the adjacent pole position, its value is the largest. Magnetoresistive components due to magnetoresistive effect, its resistance will change with the magnetic field changes in the role of the external potential, the change in the resistance value of the resistance on the voltage changes, the output of the bridge circuit Voltage also will change.
Therefore, the magnetic encoder bridge circuit output signal and the drum rotation is closely linked. When the magnetic drum rotates one magnetization length, the magnetic field changes half cycle, the signal output changes a cycle, the number of magnetic pole pairs on the drum and the cycle number of the output signal are the same in one revolution. The position and rotational speed of the drum can be known by measuring the number of cycles or the cycle time of the output signal
 Previous:Roundss non-contact Hollow Shaft Rotary Magnetic Ring Encoder For CNC machine Next:China servo motor suppliers Roundss TTL square wave incremental encoder servo motor control servo mo
Previous:Roundss non-contact Hollow Shaft Rotary Magnetic Ring Encoder For CNC machine Next:China servo motor suppliers Roundss TTL square wave incremental encoder servo motor control servo mo
 Products
Products